

IDTechEx reports that the robotic surgery market will reach over $12 billion by 2030. Within this industry catheter navigation is an emerging, but lesser known application, that is rapidly gaining traction. IDTechEx's findings are detailed in the recently published report "Innovations in Robotic Surgery 2020-2030: Technologies, Players & Markets".
Catheters are widely used to conduct an intervention within the blood vessels or airways. Traditional catheter ablation procedures have a success rate of approximately 60% and can be very long - sometimes several hours. The medical guidewires used in such procedures are passive, meaning that they must be manipulated manually. They hence require a high level of expertise to be successfully navigated through the narrow and tortuous circuitry of the vasculature, particularly as guidewires can generate friction and damage vessel linings if they get stuck in a tight space. Repeat ablations due to failure of the initial procedure are a common occurrence and dramatically increase treatment costs.
To navigate medical instruments inside a patient's blood vessels or airways, surgeons rely on X-ray imaging to provide an image of the instrument's location and direction. This means that surgeons are exposed to a high level of radiation on a daily basis. They therefore need to wear protective gear, which may obstruct their movements and reduce the efficiency of the procedure.
Robotic systems may eliminate the need to manually push and manipulate the wire. This could greatly improve patient outcomes by increasing the speed and efficiency of the intervention. Surgeons could be in another room or a different city, controlling the device with a joystick, thereby reducing the level of radiation inflicted on them.
In time, the idea is to enable telerobotic surgery. Surgeons would be able to operate the wire remotely to rapidly treat patients in isolated areas. This way, patients would not have to be transported to large hospitals where qualified surgeons are present. Surgeons could simply perform the procedure from their location - thus accelerating time to treatment and improving patient outcomes.
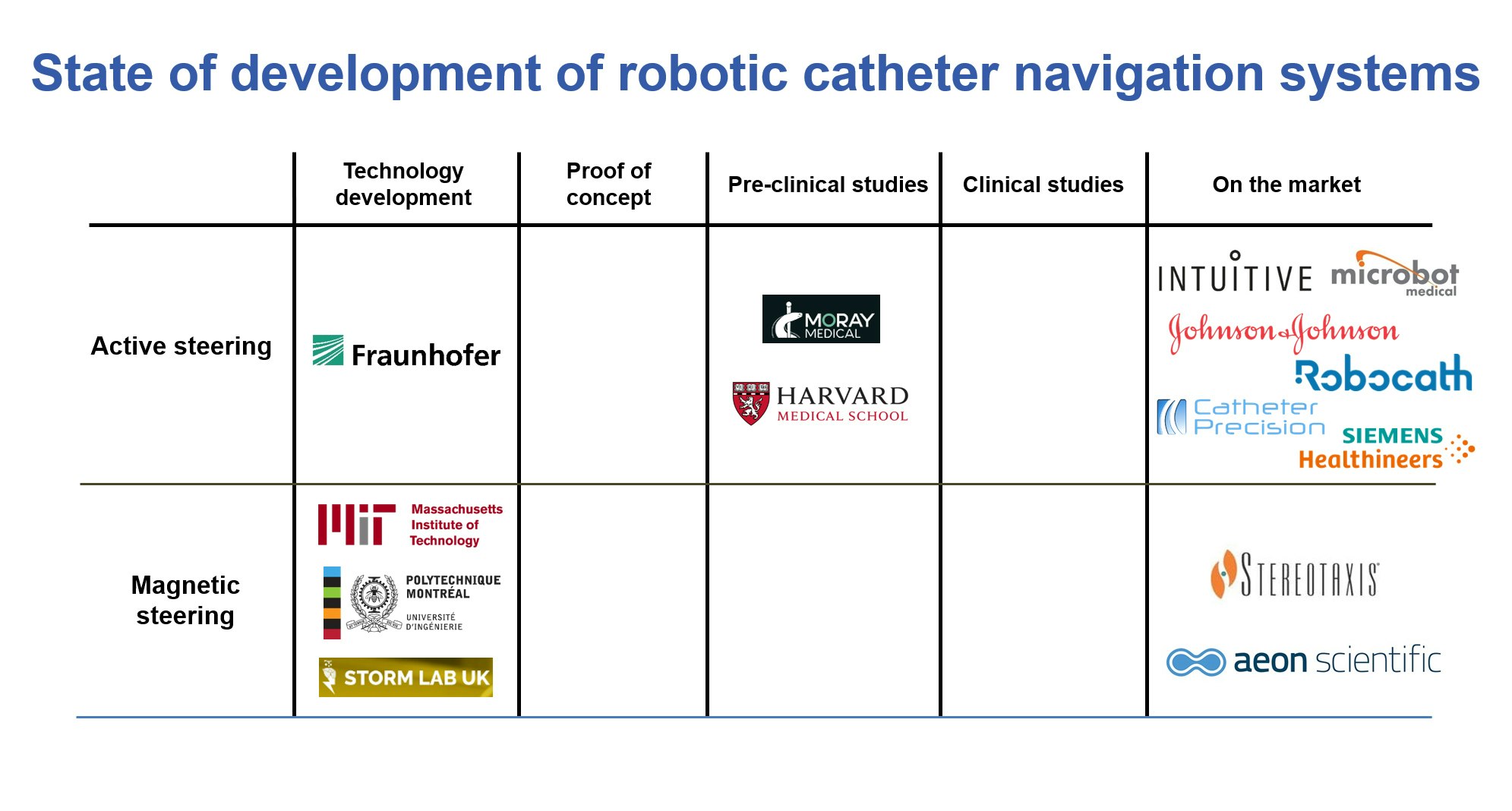
The robotic navigation of catheters and endoscopes relies on a motor, a robotic advancer unit, to move the wire forwards and backwards. Traditionally these units use motorised rollers to create movement, however other methods, such as Moray Medical's computer-controlled microfluidic pressure technology, also exist.
While some guidewires are steered using robotic mechanisms an approach is being explored to passively steer the catheter. This involves the use of magnetic forces to draw the tip of the catheter or endoscope in a particular direction. The catheter or endoscope has a miniature magnet at its tip which responds to the pull of the external magnet. Magnetic steering provides the surgeon with a higher level of control of the instrument as it offers a wider range of motion and allows rapid changes of direction.
To magnetically navigate medical instruments inside the body, the direction of the magnetic pull must be constantly adjusted in order to steer the instrument in different directions. Currently, there are two approaches to achieve this:
• Moving the magnet around the patient
• Moving the patient around the magnet
Depending on the approach, the robotic arm has different roles within the platform. In the former, the robotic arm holds the magnet and in the latter, it carries the patient table. The former approach has so far been explored more. Typically, robotic platforms for magnetically navigating catheters and endoscopes comprise one or more robotic arms, a table where the patient lies, X-ray imaging and an imaging viewing station to track the instrument.
The robotic catheter navigation market has the fastest growth rate in the entire robotic surgery industry and is forecast to grow at 9.95% CAGR in the next decade. The growth is primarily due to the entry of large companies into this sector, primarily Intuitive Surgical and Auris Health (owned by Johnson & Johnson), in 2018-2019, which demonstrates the high level of interest in this sector of robotic surgery.
Intuitive Surgical has developed a robotic-assisted endoluminal platform, Ion, for non-invasive peripheral lung biopsy. The system can pass through complex airway circuitry to reach all 18 segments of the lung and moves 180° in all directions to allow precise needle biopsy. During the bronchoscopy, a fibre optic shape sensor measures the full shape of the catheter hundreds of times per second, providing real-time precise location and shape information throughout the whole navigation and biopsy process. Auris Health's catheter navigation system is also designed for peripheral lung biopsy. Its technology, the Monarch Platform, has been used in over 1,500 lung nodule biopsy procedures to date. Monarch incorporates flexible robotics, endoscopes and micro-instruments into a single surgical platform for therapeutic and diagnostic bronchoscopic procedures. The platform combines traditional endoscopic views into the lung with computer-assisted navigation based on 3D models of the patient's own lung anatomy. The sheath can be articulated up to 130 degrees in any direction to create a stable base to advance the small bronchoscope. Once advanced beyond the sheath, the bronchoscope provides an additional 180 degrees of flexion in any direction. This advanced manoeuvrability is important to navigate the convoluted anatomy of the lungs. Each component of the bronchoscope can be independently articulated, advanced, retracted, and positionally locked.
IDTechEx predicts that robotic platforms for the navigation of catheters will continue to establish themselves in hospitals in the coming years. Unlike many surgical robots, the value of which is still under debate, they are proven to improve clinical outcomes by reducing the need for follow-up procedures and accelerating patient recovery. More importantly, they lighten the workload of over-burdened clinical staff - thereby addressing one of the key challenges in healthcare today. High costs are often an issue with robotic surgery systems, but robotic navigation platforms are much cheaper than most surgical robots and are hence are more cost-effective than most of their general surgery counterparts. Due to the value of these systems, more companies are likely to enter this space in the coming years and the demand for this type of technology is likely to grow.
Challenges for the future mainly apply to magnetic steering as it is a less developed method of navigation. They include finding the right stiffness of thread and the optimal strength of magnetic field. Magnetic catheters must be flexible enough to be deflected by a magnetic field but rigid enough to provide sufficient force and stability. These conflicting requirements have limited the design options and effectiveness of magnetic catheters to date. Furthermore, the ablation force achievable by magnetic catheters depends strongly on the catheter's bending angle. At angles greater than 90 degrees, it can be difficult to achieve any significant force during procedures such as ablation. In addition, magnetic steering needs a high level of autonomy as the robotic platform often automatically calculates the trajectory of the instrument (computer-aided localisation and mapping). Finally, it is important to highlight a substantial limitation of magnetic navigation systems - they are not suitable for patients with a bioelectronic implant, such as a pacemaker. Also, the powerful magnets prevent the use of additional surgical tools.
IDTechEx's findings are not restricted to robotic catheter navigation and cover the entire robotic surgery industry. The report breaks down the market landscape and emerging technologies. To obtain market forecasts and information on the latest trends and technologies in the field of robotic surgery, please refer to the IDTechEx report "Innovations in Robotic Surgery 2020-2030: Technologies, Players & Markets".
